
Ocean Cleanup, SeaCleaners, Free the Ocean oder Waste free ocean: Diese und ähnliche Projekte wollen dafür sorgen, dass die Meeresoberfläche bis zu einer gewissen Tiefe von Plastikmüll gesäubert wird. SeaClear hingegen hat sich vorgenommen, die ersten Roboter zu konstruieren, um Abfälle vom Meeresboden zu holen.
 [1]
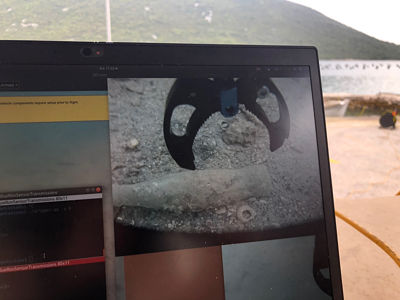
[1]Foto: SeaClear / Lucian Busoniu
Maritime Abfälle gibt es genügend. Das belegt eine Studie von Eunomia, der unabhängigen britischen Unternehmensberatung, zur Verbreitung von Abfällen in der Meeresumwelt aus dem Jahr 2016. Danach landen jedes Jahr insgesamt 12,2 Millionen Tonnen an Kunststoffresten in den Meeren: Rund neun Millionen Tonnen sind falsch entsorgte Abfälle aus bis zu 50 Kilometer Entfernung von der Küste. Geschätzte 0,5 Millionen Tonnen tragen Flüsse ein. Auf See werden durchschnittlich 1,75 Millionen Tonnen entsorgt, davon rund 1,15 Millionen Tonnen aus Fischfang und 0,6 Millionen Tonnen Schiffsabfälle. Und primäres Mikroplastik trägt rund 0,95 Millionen Tonnen zusätzlich bei, darunter Farbrückstände aus Schifffahrt, Straßenbau und Hochbau. Hinzu kommen Textilien mit 190.000 Kilogramm, Pellets mit 230.000 Kilogramm und Reifenabrieb mit 270.000 Kilogramm.
90 Prozent Ablagerung
Bemerkenswert ist jedoch die Verteilung der maritimen Reststoffe. Während die durchschnittliche Konzentration an Meeresabfällen weltweit bei 0,74 Kilogramm pro Quadratmeter (kg/m2) liegt, sind Strände mit rund 2.000 kg/m2 belastet. An der Meeresoberfläche treibende Kunststoffteile belaufen sich auf 18 kg/m2, während am Meeresboden durchschnittlich 70 kg/m2 lagern.
Um- beziehungsweise hochgerechnet auf alle bisher entstandenen Meeresabfälle ergibt sich unter Zugrundelegung von Studien aus den Jahren 2013 und 2014 folgende Verteilung: An Küsten befinden sich rund 1,4 Millionen Tonnen, abgelagert auf Sandstränden zudem 57.000 Tonnen. Auf der Meersoberfläche treiben 270.000 Tonnen, während auf dem Meeresboden je nach Abfalldichte geschätzte 25,3 bis 65 Millionen Tonnen zu finden wären; eine Dichte von 400 kg/m2 zugrunde gelegt, würde sich die Belastung auf 144 Millionen Tonnen belaufen. Nach Berechnungen von Eunomia könnten damit bis zu 94 Prozent der quantifizierbaren Plastik-Sinkstoffe am Grunde der Ozeane zu finden sein. Schätzungen des WWF weisen 80 Millionen Tonnen Kunststoffe aus, sehen aber auch einen Anteil von rund 90 Prozent Bodenablagerung.
USV, ROV und UAV
Der Aufgabe, einen Teil dieser Abfälle am Meeresboden aufzuspüren und abzutragen, hat sich das SeaClear-Projekt – unter anderem in Zusammenarbeit mit einem Team der TU München und einer Gruppe des Fraunhofer-Centers für Maritime Logistik und Dienstleistungen CML – zur Aufgabe gemacht. In einem Gespräch mit den Projektverantwortlichen Johannes Oeffner und Cosmin Delea wurde deutlich, dass dabei verschiedene Roboterfahrzeuge miteinander vernetzt werden: „Ein autonom fahrendes oder ferngesteuertes Mutterschiff (USV) an der Oberfläche wird durch zwei Unterwasser-Roboter (ROV) und eine Flugdrohne (UAV) unterstützt. Die Drohne und einen Roboter setzen wir für die Kartierung des Mülls auf der Oberfläche und in der Wassersäule ein. Der zweite Roboter sammelt an Hand dieser Informationen den kartierten Müll mit einem Greifarm und einer Saugvorrichtung am Meeresboden und bringt ihn zum Sammelbehälter am Schiff.“
Das Procedere testen
Im Frühjahr 2020 starteten erste Tests an zwei unterschiedlichen Standorten in verschiedenen Szenarien in Tiefen von 20 bis 30 Metern. Im Hamburger Hafen sollte das Procedere bei laufendem Hafenbetrieb mit bestehender Infrastruktur und festen Abläufen demonstriert werden. Erschwerend kamen hier ein trübes Gewässer mit geringer Sichtweite und das Fehlen statistischer Unterlagen über Art und Menge der Unterwasserabfälle hinzu. Der Test im Dubrovniker Küsten-Szenario war an den kroatischen Tourismussektor adressiert und sollte konkret auf die Gewässerreinigung in touristischen Hot-Spots abzielen. Hier bestand die Herausforderung in einer Reihe von zusätzlichen Sicherheitsmaßnahmen, um den Zugang der Öffentlichkeit nicht zu beschränken.
 [2]
[2]Foto: SeaClear / Lucian Busoniu
Weitere Versuche fanden Mitte September 2021 statt, als sich in Dubrovnik – trotz Corona – zum ersten Mal Vertreter aller am Projekt Beteiligten trafen. In Marseille wurde am 15. Dezember 2021 erstmals das neu entwickelte LARS (Launch and Recovery System/Ablege- und Bergungs-System) für den Tortuga getestet, das auch für mehrere Sammel-Roboter installiert werden kann. Im Mai 2022 soll es weitere Versuche im Hamburger Hafen geben.
Mit SeaCat und Tortuga
Am Ende aller noch ausstehenden Versuche sollte folgender Ablauf erprobt sein: Ein unbemanntes Wasserfahrzeug – der SeaCat – scannt den Meeresboden des betreffenden Terrains mit einem Fächer-Echolot, das eine dreidimensionale Tiefsee-Karte des Bodens liefert. Möglicherweise sind dadurch bereits große Teile wie Reifen oder Rohre erkennbar. Ist das Wasser ausreichend klar, sucht eine Drohne oder ein unbemanntes Fluggerät aus der Luft nach Abfällen. Sind größere Objekte identifizierbar, wird im nächsten Schritt der Unterwasser-Roboter informiert. Dann löst sich ein kleines unbemanntes Unterwasser-Gefährt von der SeaCat und scannt den Meeresboden aus nächster Nähe, um mithilfe einer Kamera und einem Vorwärts-Sonar Kleinteile zu finden; möglicherweise kommen dabei auch andere Sensoren wie Metalldetektoren zum Einsatz.
Identifizierte Abfälle werden auf eine Referenz-Karte gesetzt. Ihre Identifikation erfolgt mittels künstlicher Intelligenz und Deep Learning, um Müll von maritimem Leben zu unterscheiden. Anschließend tritt der sogenannte Tortuga, ein weiterer Unterwasser-Roboter, in Aktion. Er schwimmt zu jedem Ort, an dem Abfall angezeigt wurde, und erfasst das Objekt mit seinem speziellen Greifarm, der auch unter schwierigen Umständen akkurat zupacken kann. Der Greifer legt jedes Teil in einen zum SeaCat gehörenden Unterwasser-Korb, der ständig Signale sendet, damit der Sammel-Roboter sich richtig für den Einwurf positionieren kann.
Erwartete Erfolgsquote: 90 Prozent
Bislang, räumt das SeaClear-Team ein, gibt es noch keine Lösungen, die autonome Roboter zur Unterwasser-Suche von Abfällen nutzen. Das SeaClear-Projekt möchte das erste System entwickeln und zwar durch online-Identifizierung und -Unterscheidung von Abfällen und Meereslebewesen durch Unterwasser-Sensoren, durch integrierte Unterwasser- und Oberflächenwasser-Kartierung, durch Unterwasser-Sammlung kleiner sowie größerer Abfälle und schließlich mittels kooperativer Kontrolle des RoboticTeams. Wie ein YouTube-Clip verrät, soll das voll einsatzfähige SeaClear-System Unterwasser-Abfälle mit einer Erfolgsquote von 80 Prozent klassifizieren und mit eine Erfolgsquote von 90 Prozent einsammeln – bei 70 Prozent geringeren Kosten im Vergleich zu Tauchern und ohne deren Leben zu gefährden.
(Erschienen im EU-Recycling Magazin 02/2022, Seite 28, Foto: SeaClear / Lucian Busoniu)
 [3]
[3]Anzeige