
Wie Plastikmüll am Meeresgrund aufgespürt werden kann
Im Förderprojekt „MtecPla“ entwickeln Partner aus Industrie und Forschung eine Monitoring-Technologie, die Kunststoffabfälle am Meeresboden identifiziert und visualisiert.
Nur ein geringer Teil des Plastikmülls in den Weltmeeren schwimmt auf der Oberfläche; der Rest sinkt in tiefere Gewässer oder auf den Meeresboden und bedroht die dortige Pflanzen- und Tierwelt. Bisher gibt es keine Möglichkeit, Plastik am Grund der Ozeane großflächig aufzuspüren. Traditionelle Monitoring-Methoden, bei denen Taucher manuell Bilddaten entlang von Linien oder gespannten Schnüren (sogenannten Transekten) erheben, ermöglichen nur Aussagen über sehr begrenzte Gebiete. Zudem sind diese Verfahren äußerst zeitaufwändig, kostspielig und in tieferen Gewässern nahezu unmöglich. Auch liefern sie in der Regel keine georeferenzierten Daten, anhand derer sich Standorte wiederfinden lassen, etwa um Plastik zu bergen oder dessen Zustand zu überprüfen.

Die planblue-Technologie unter Wasser (Foto: Alexis Pey/Thalassa)
Eine effizientere Lösung ist gefragt
Hieran arbeitet ein Konsortium aus Industrie und Forschung: die planblue GmbH, das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI), die Kurt Synowzik Werkzeug u. Maschinenbau GmbH & Co. KG und das Institut für Biomaterialien und biomolekulare Systeme der Universität Stuttgart. Ziel des Projekts „MtecPla“ ist die Entwicklung einer innovativen Monitoring-Technologie, die automatisiert und großflächig Plastikmüll sowie verschiedene Plastikarten am Meeresgrund erkennen und bestimmen kann. Zudem soll das neue System den Zustand des Plastiks erfassen und die Ergebnisse mit georeferenzierten Daten koppeln.
Auf diese Weise ist es nicht nur möglich, den Grad der Verschmutzung einzuschätzen, sondern außerdem Veränderungen des Plastikmülls über beliebige Zeiträume hinweg zu verfolgen und Reinigungsmaßnahmen zu planen. Das neue System soll dabei nicht nur von Tauchern, sondern ebenso auf ferngesteuerten oder autonomen Unterwasserfahrzeugen einsetzbar sein. Die aus den Tauchgängen gewonnenen Informationen sind dank automatisch erstellter, farbcodierter Karten auch ohne Expertenwissen verständlich und daher bei der Plastikbekämpfung von vielfältigem Nutzen – etwa zur Strategieentwicklung für politische Entscheidungsträger und NGOs, zum Erstellen von Leitlinien und neuen Gesetzgebungen oder zur Sensibilisierung der Öffentlichkeit.
Hightech für präzise Ergebnisse
Zur Realisierung ihres Vorhabens setzen die Projektpartner auf die Kombination hyperspektraler Bildgebung und neuartiger, auf Künstlicher Intelligenz (KI) basierender Algorithmen. Hyperspektrale Kameras registrieren in jedem Pixel nicht nur Farbinformationen über Rot, Grün und Blau, sondern auch Lichtanteile in mehreren hundert verschiedenen Wellenlängen im sichtbaren und Nah-Infrarot-Bereich. So kann die sogenannte spektrale Signatur eines Objektes erfasst werden, die durch das Absorbieren und Reflektieren von Licht entsteht.
Anhand der charakteristischen Reflexionsspektren lassen sich die Algorithmen trainieren, um in der Gesamtmenge der aufgenommenen Daten Plastikmüll am Meeresboden präzise erkennen, klassifizieren und die für die visuelle Darstellung notwendigen Daten extrahieren zu können. Die Partner setzen hierfür sogenannte Convolutional Neural Networks ein – eine Sonderform künstlicher neuronaler Netze, die bereits bei der automatisierten Plastikerkennung auf der Oberfläche von Gewässern und der Sortierung von Kunststoffen vielversprechende Ergebnisse liefert.
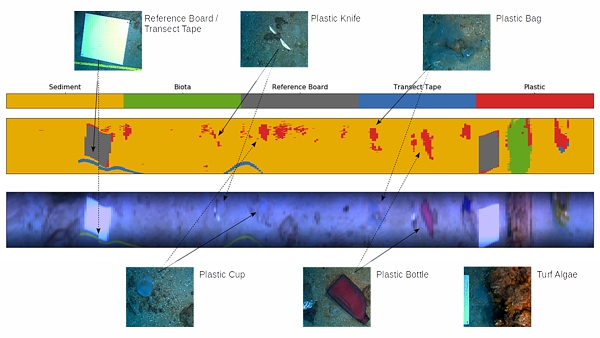
Testergebnisse des ersten Versuchs mit hyperspektralen Sensoren, um unter Wasser Plastik zu erkennen (Grafik: planblue)
Damit die Technologie unter Wasser funktioniert, soll in „MtecPla“ zudem ein wasserdichtes Gehäuse konstruiert werden, welches sicherstellt, dass das Licht optimal in der Kamera ankommt. Ein hoher und effektiver Korrosionsschutz bei gleichzeitig geringem Gewicht sind zusätzliche Anforderungen, die das Gehäuse erfüllen muss. Eine weitere Herausforderung stellt die Unsicherheit in der Datenerfassung dar. So entstehen beim Scannen des Meeresbodens Kartenstreifen, die anschließend zusammengefügt werden müssen. Dabei ist wichtig, dass keine Informationen zwischen den Streifen verloren gehen, da sonst unvollständige Karten entstünden. Um dies zu vermeiden, erarbeiten die Partner ein neuartiges Missions- und Pfadplanungsverfahren, das die Aufnahmen mit Blick auf eine vollständige Sensorabdeckung plant, Tauchpfade automatisch berechnet und das Fehlen von Daten erkennt, um unzureichend erfasste Stellen erneut anzusteuern.
Tests im Labor und unter Realbedingungen
Die entwickelten Komponenten werden im Projekt zunächst mit bereits identifizierten Plastikarten sowie speziell angefertigten Sediment-Plastik-Gemischen unter kontrollierten Laborbedingungen getestet und evaluiert. Hierfür steht ein 20 Kubikmeter großes Wasserbecken am Robotics Innovation Center des DFKI zur Verfügung, welches sich abdunkeln und eintrüben lässt und so meeresbodenähnliche Bedingungen schafft.
Anschließend soll das neue System auch außerhalb des Labors am Grund eines Sees erprobt werden. So ist die im Rahmen des Vorhabens entwickelte Technologie auf die Plastikdetektion in allen aquatischen Lebensräumen übertragbar. Zudem ergeben sich völlig neue Anwendungsfelder, etwa im Bereich des Monitorings von Unterwasserkonstruktionen wie Offshore-Windparks, Aquakulturen und beim Küstenbau. Auch lässt sich die Software nutzen, um außerhalb von Wasser hyperspektrale Bilder zu verarbeiten.
(Erschienen im EU-Recycling Magazin 01/2021, Seite 42, Foto: Joost den Haan/planblue)









