
Automatisierte Demontage von Elektrogeräten
Im Projekt iDEAR, kurz für Intelligente Demontage von Elektronik für Remanufacturing und Recycling, kombinieren Forschende am Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF in Magdeburg Wissensmanagement, Mess- und Robotertechnik und Künstliche Intelligenz zu einem intelligenten System für automatisierte und zerstörungsfreie Demontageprozesse, um ein zertifizierbares und geschlossenes Abfallmanagementsystem zu etablieren.
„Wir wollen die Demontage von Elektroschrott revolutionieren“, erklärt Dr. José Saenz, Gruppenleiter Assistenz-, Service- und Industrieroboter am Fraunhofer IFF. „Aktuelle Lösungen sind mit hohem Engineeringaufwand verbunden und beschränken sich auf eine bestimmte Produktgruppe. Im Projekt iDEAR streben wir eine datengetriebene Methodik an, damit von PCs über Mikrowellen bis hin zu weißer Ware möglichst verschiedene Produkte mit geringem Engineeringaufwand und in Echtzeit demontiert werden können.“ Zunächst fokussieren sich die Forschenden auf die automatisierte Demontage von PCs; das Verfahren soll aber langfristig auf beliebige Geräte wie etwa Waschmaschinen erweiterbar sein.
Erkennung und Klassifizierung
Nachdem die Waren angeliefert und vereinzelt wurden, steht die Identifikation und Befundung am Anfang der Prozesskette. Dabei erfassen KI-basierte 3D-Kamera- und optische Sensorsysteme Label mit Angaben zu Hersteller, Produkttyp und -nummer, erkennen Typ und Lage von Bauteilen, überprüfen Geometrien und Oberflächen, bewerten den Zustand von Verbindungselementen wie Schrauben und Nieten und detektieren Anomalien.
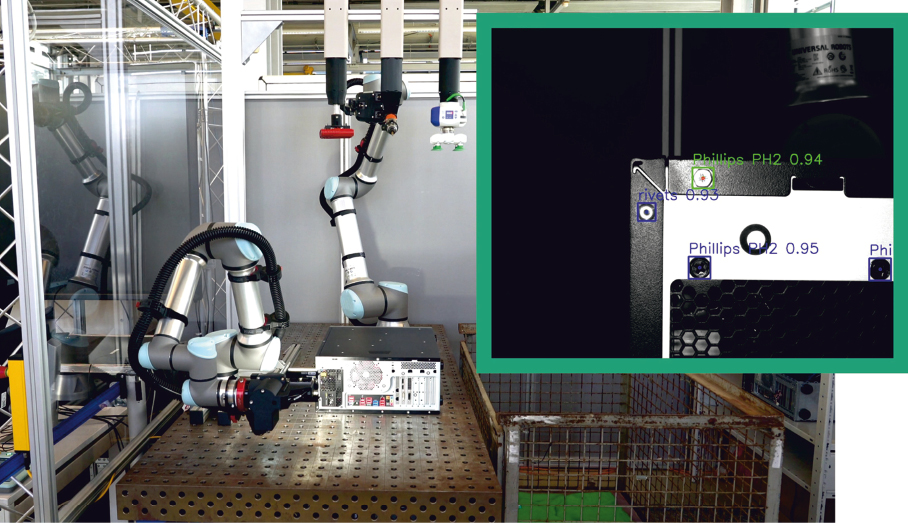
Der Roboter lokalisiert die Schrauben am PC-Gehäuse und steuert sie an (Foto: Fraunhofer IFF)
„Optische Messtechnik hilft, Etiketten zu erfassen und unterschiedliche Bauteile wie etwa Schrauben zu sortieren. Zuvor trainierte Machine-Learning-Algorithmen und KI werten die Bilddaten aus und ermöglichen die Erkennung und Klassifizierung von Materialien, Kunststoffen und Komponenten auf Basis von Sensor- und Spektraldaten in Echtzeit“, schildert Saenz. Beispielsweise erkennt die KI, ob eine Schraube verdeckt angebracht oder verrostet ist. Alle Daten werden in einem digitalen Demontagezwilling festgehalten, der gewissermaßen eine Instanz des Produkts ist und auch darüber informiert, ob ein ähnliches Produkt schon einmal demontiert wurde.
Im nächsten Schritt legen Saenz und sein Team in einer Software die Demontage-Sequenzen fest, die unter anderem definieren, ob eine vollständige oder partielle, also nur auf die Rückgewinnung hochwertiger Komponenten gerichtete, Demontage stattfinden soll. Denn verklebte Komponenten oder andere Fügeverbindungen verhindern eine zerstörungsfreie Demontage. Auch verrostete Schrauben, verschlissene Schraubköpfe oder deformierte Komponenten sind nicht dafür konzipiert.
Komplett eigenständig
Auf Basis dieser High-Level-Informationen startet der Demontageprozess. Der Roboter erhält eine Reihe von abzuarbeitenden Anweisungen und Abläufen wie: „Entferne links am Gehäuse zwei Schrauben, öffne das Gehäuse etc.“ Sofern erforderlich, wechselt die Maschine zwischen den einzelnen Arbeitsschritten das jeweils erforderliche Werkzeug. Zu den in den Demontagesequenzen festgelegten Skills gehören Roboterhandlungen wie Schrauben, Heben, Schneiden, Herausziehen, Lokalisieren, Neu-Positionieren, Anfahren, Ablegen, Hebel-Betätigen, Biegen, Brechen, Kabel-Schneiden, die der Demontageroboter komplett eigenständig ausführen kann. In Tests ist es dem Demonstrator sogar gelungen, ein Mainboard aus einem PC-Gehäuse zu nehmen – eine sehr komplexe Aufgabe, die ein hohes Maß an Feinfühligkeit verlangt. „Hier haben wir KI eingesetzt. Ein KI-Agent trainiert die Lösung des Prozesses zunächst am Simulationsmodell; später übertragen wir die so trainierte Roboterhandlung auf den realen Versuchsaufbau. Bei einfachen Skills wie beispielsweise Lokalisieren ist das nicht erforderlich; dort nutzen wir Sensor- und Kameradaten“, führt Saenz aus.
Die einzelnen Demonstratoren zu den Teilprozessen sind aufgebaut: Eine Station für die Identifikations- und Befundung von PCs, ein Demonstrator des Bewertungsmodells mit Verknüpfung zum Digitalen Zwilling des Produkts und der Demontagesequenz, ein Digitaler Zwilling-Demonstrator, einer, der zeigt, wie Skills-basierte Roboterhandlungen zur Demontage automatisch ausgeführt werden, sowie ein Demonstrator für die KI-basierte Generierung von Roboterhandlungen zur Entnahme von Motherboards aus dem Gehäuse. Im nächsten Schritt müssen die Demonstratoren miteinander verkettet werden. Ziel ist ein Demonstrator, der alle technologischen Entwicklungen integriert und die Verkettung automatisierter Demontageprozesse darstellt.
(Erschienen im EU-Recycling Magazin 03/2025, Seite 40, Fotos: Fraunhofer IFF)









