Wertstoffsortierung mit KI
Das Förderprojekt „SmartRecycling-Up“ unter der Koordination des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) entwickelte ein KI-basiertes Gesamtkonzept zur Rückgewinnung von Kunststoffen, Metallen oder Holz. Ermöglicht wird die automatisierte Sortierung großstückiger, sperriger Abfälle mit einem Kran oder Bagger.
Die Entwicklung kommt ohne mechanische Zerkleinerung aus. Ein neuartiger technischer Ansatz vereint moderne KI-gestützte Sensorik, maschinelles Lernen und automatisierte Steuerungssysteme in einem intelligenten Gesamtkonzept. Das System umfasst einen hydraulischen Kran, der durch KI-basierte Steuerung in die Lage versetzt wird, die komplexen Aufgaben beim Umschlag von Abfällen sowie den Sortierprozess selbstständig zu übernehmen. Dazu zählen unter anderem das Umlagern und Durchmengen des Abfallgemischs, das gezielte Befüllen eines Zerkleinerers, das Erkennen und Entfernen von Störstoffen sowie das separate Aussortieren von Wertstoffen.

Der automatisierte Kranbetrieb wurde erfolgreich in der Müllsortieranlage der ASO GmbH in Osterholz-Scharmbeck getestet
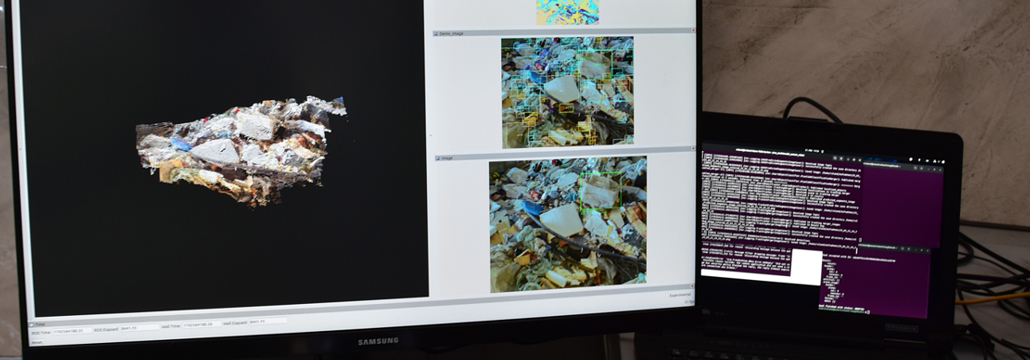
Kern des Systems ist eine hochentwickelte Sensorplattform, bestehend aus multispektralen Kameras, Tiefensensoren und KI-basierten Auswertungsverfahren, die eine präzise Materialklassifikation und -lokalisierung im dreidimensionalen Raum ermöglichen. Die erkannten Materialien werden in Echtzeit analysiert und Entscheidungen über die Handhabung automatisch an die Steuerung des Krans übermittelt. So kann das System zwischen verwertbaren Stoffen und Störstoffen unterscheiden.
Autonome Steuerung durch lernfähige Systeme
Das DFKI hat im Rahmen von „SmartRecycling-Up“ ein KI-basiertes Steuerungsframework entwickelt, das die Bewegungs- und Prozesssteuerung hydraulischer Schwermaschinen wie Kräne oder Bagger für das Recycling vollständig automatisieren kann. Das Framework besteht aus verschiedenen Modulen, die unterschiedliche Funktionalitäten für die Automatisierung abdecken. Das Modul „SmartMotionController“ nutzt Deep Reinforcement Learning, um die Bewegungsabfolgen der Maschine zu erlernen. Dazu analysiert es fortlaufend, wie die Maschine auf bestimmte Steuerbefehle reagiert, und passt die Bewegungsplanung entsprechend an. Grundlage dafür sind die Daten des Moduls „SmartStateEstimator“. Dieses Modul verarbeitet perspektivische Daten, die von externen Kamera- und Lidarsystemen während des Betriebs der Maschine erfasst werden. Um die Ausrichtung der Maschine kontinuierlich zu schätzen, arbeitet es mit generativer KI für Bildverarbeitung und anderen fortschrittlichen KI-Verfahren. So lernt der Controller die Beziehung zwischen Steuerbefehlen sowie Maschinenbewegungen und kann den Greifarm dadurch autonom steuern. Ein „SmartProcessController“ koordiniert zudem den gesamten Prozess von der Objekterkennung über die Lageabschätzung bis hin zur kollisionsfreien Trajektorienplanung und -ausführung.
Erfolgreiche Tests im Labor und unter Realbedingungen
Die Technologien wurden zunächst mithilfe des Baggerroboters „Arter“ im Labor des DFKI entwickelt und getestet. Anschließend erfolgte der Einsatz unter Realbedingungen: In der Müllsortieranlage der ASO GmbH in Osterholz-Scharmbeck konnten der automatisierte Betrieb mit einem Hydraulikkran erfolgreich umgesetzt und verschiedene Aspekte der Lösung validiert werden. Dazu gehörte, dass der Kran vorab definierte Wertstoffe zuverlässig erkennen und aussortieren konnte. Die Tests zeigten, dass die Kombination aus KI, Sensorik und Robotik auch im Bereich der Abfallverwertung funktioniert. Zukünftig kann damit die Effizienz der Vorsortierung gesteigert, die menschliche Arbeitsbelastung reduziert und die Qualität des Recyclingprozesses verbessert werden.
(Erschienen im EU-Recycling Magazin 08/2025, Seite 46, Fotos: Martin Wittmaier, Hochschule Bremen)








